Drako DriveOS™
Brings hard real-time to Linux, maximizing development efficiency & performance
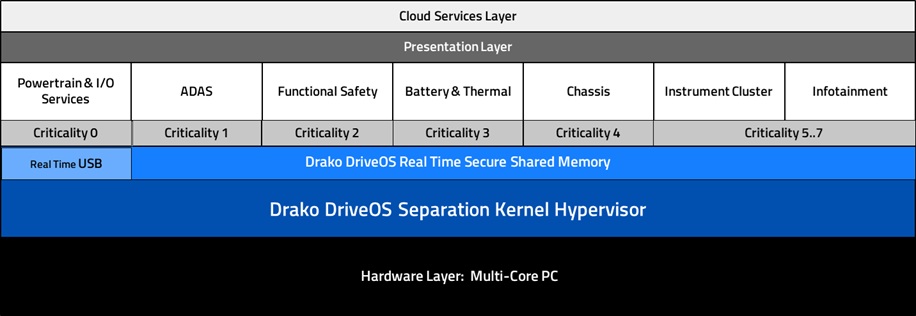
DriveOS is a unified software system that can run all automotive sub-systems side-by-side on modern multi-core processors, on a separation-kernel architecture that isolates mixed-criticality workloads.
The platform combines HyperResponse™ vehicle performance with the flexibility of a standard OS — allowing manufacturers to seamlessly port existing applications without rewriting code.
DriveOS detects faults and dynamically recovers sub-systems – providing superior system safety and continuous operation, with comprehensive over-the-air serviceability.

What sets Drako DriveOS apart?
Drako DriveOS is a true unified drive operating system, serving as a single software platform to directly manage and control all the resources — including compute, memory, I/O, and timing — across all vehicle subsystems.
In contrast with middleware approaches built on legacy systems, DriveOS’ operating system architecture was built from the ground up to run safety critical and non critical workloads together with full isolation.
Sub-systems can be updated independently, so each sub-system can be patched or upgraded without disturbing the others. Further, a safety incident in one subsystem doesn’t compromise the rest of the system.
The Technologies that Make DriveOS Possible
DriveOS is fully validated in Drako Motors’ production supercars, where it runs core vehicle systems—including powertrain and digital cockpit—on a single multi-core processor.
The software platform has proven its nanosecond response and reliability in one of the world’s most demanding automotive environments — these luxury electric supercars push the limits of performance, control, and software integration.
OneECU™ Architecture: One ECU for all functions (control systems, digital cockpit, ADAS), dramatically reducing hardware costs, complexity, and mass.


DriveOS fully validated on Drako Motors luxury supercars
Separation kernel architecture: 5,000x performance advantage
Drako’s separation kernel consolidates all vehicle functions onto a single multicore processor with mathematically verified isolation, achieving nanosecond-level task communication — three orders of magnitude faster than traditional multi-ECU architectures connected over TSN automotive Ethernet.
This speed advantage delivers the ultra-fast, deterministic responsiveness needed for advanced vehicle dynamics, high-speed sensor fusion, and highly responsive ADAS, while maintaining formally provable guarantees that faults or security breaches in one subsystem cannot affect others.
Our platform architecture also enables smooth application migration, allowing manufacturers to reuse existing software with minimal change, accelerating deployment across a wide range of vehicle platforms.
HyperSafety™ Defines New Safety Standard
Drako’s HyperSafety™ defines a new multi-layer, system-level standard for automotive safety performance, delivering predictable real-time behavior under all operating conditions.
When timing is unpredictable, systems become unsafe. While manufacturers can complete certification processes and documentation, certification such as ISO 26262 is primarily procedural rather than proof that a system delivers predictable real-time performance under all operating conditions.
DriveOS moves beyond procedure to deliver:
- Ultra-safe driving responsiveness
- Continuous operation
- Cyber-secure connectivity
Drako DriveOS SymbiOSis™ Unleashes Super Linux
– Hard real-time performance for general-purpose operating systems
– Secure, mixed-criticality workloads on same multicore processor
– Strict performance isolation via hardware-enforced spatial partitioning (cores/memory) with formal proof, eliminating resource contention
– Jitter-free hard real-time determinism through hardware-enforced temporal partitioning (scheduling) with mathematical verification
– Simplified security certifications – minimal codebase, formal verification possible
– Provably secure against cyber threats via mathematically verified, hardware-enforced isolation with zero shared state between partitions
